The stick insect is a popular model organism in biological research for gaining a better understanding of insect walking movements. The advantage of the stick insect is that the structure of its body parts and nervous system are comparatively simple. For decades, textbooks have claimed that the force for maintaining body posture and driving movement was controlled independently by different joints. Now, as biologist Chris Dallmann reports, "this is not correct." The doctoral researcher at the Cluster of Excellence Cognitive Interaction Technology (CITEC) at Bielefeld University explains that "actually, one and the same joint is responsible for both functions, and we can show this with our new analyses." Dallmann presented these findings together with Professors Dr. Volker Dürr and Dr. Josef Schmitz in "Proceedings of the Royal Society," a prestigious biological research journal. The New York Times also featured the researcher's work in a video report on Monday, 15 February 2016.
"We wanted to find out how a stick insect moves, and which functions the individual parts of the leg play in its movement," explains Professor Dr. Josef Schmitz, who together with Professor Dr. Volker Dürr is supervising Chris Dallmann's doctoral dissertation. "Amazingly enough, the force for propulsion and maintaining body posture comes from the same joint. This joint serves as a power unit and generates the largest amount of force in the leg. The other leg joints serve, in a way, as steering units, which redirect the power such that the insect can both hold itself up above the ground and propel itself forward," says Dallmann. "A similar principle operates, for instance, in insect flight, where big power muscles provide the main force that is then redirected by smaller steering muscles for lift and drag. This principle of functional division apparently stood the test of evolution."
Until recently, biologists around the world believed that the force for the stick insect's forward movement came from the joint that moved the leg backwards. "The reason for this incorrect assumption was that measuring methods were not accurate enough," explains Josef Schmitz. "Stick insects only weigh about one gram. Because of their ultra-light weight, it was previously very difficult to calculate how much force an individual leg segment is exerting."
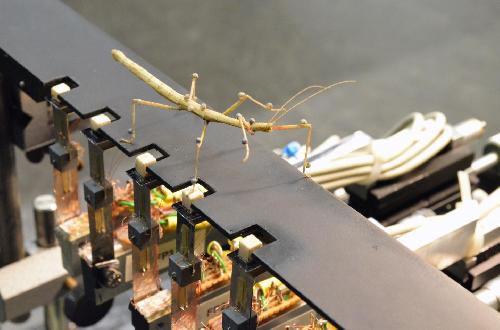 Which forces do the legs of a stick insect exert, and how does the insect move? CITEC researchers measure this on a walkway equipped with lateral force platforms (white) and reflective markers. Credit: Photo: CITEC/Bielefeld University
Which forces do the legs of a stick insect exert, and how does the insect move? CITEC researchers measure this on a walkway equipped with lateral force platforms (white) and reflective markers. Credit: Photo: CITEC/Bielefeld University
Dallmann works in the Biological Cybernetics research group, which is a participating member group in CITEC and is headed by Volker Dürr from the Faculty of Biology. Dallmann is also contributing to the further development of the walking robot Hector, the inspiration for which came from the movement of the stick insect.
The Biological Cybernetics research group has developed a new technique that works well with the stick insect's ultra-light weight. It measures the forces exerted on the ground by the entire leg with high precision. It also measures how the leg moves in space with high temporal resolution. "By combining both types of data, I can calculate how much force each individual joint exerts," explains Dallmann. In this way, Dallmann can demonstrate which joint is driving the motion, and which joints simply redirect the force.
Each of the stick insect's six legs is moved mainly by three joints. These joints are connected to the insect's body in an L-shaped manner. A hip joint (Thorax-Coxa joint), around which the leg moves backwards, connects the leg to the body. A second hip joint (Coxa-Trochanter joint) connects the hip with the thigh. Around this joint, the leg moves downwards. Finally, the knee joint (Femur-Tibia joint) connects the thigh to the lower leg, and moves the leg outwards.
In order to unravel how much force the stick insect's leg joints generate, Dallmann had his insects walk along a walkway with integrated platforms. Sensors in the platforms recorded the pressure as well as the lateral forces exerted by the insect's feet. At the same time, Dallmann recorded the insect's walking movements with a motion capture system. The Vicon system uses infrared cameras to record the movement of 17 small reflectors (markers), which are attached to exoskeleton of the stick insect. "When we combined the measurements from the insect's movements and the ground reaction forces, it became clear that propulsion does not arise from the hip joint around which the leg moves backwards," explains Dallmann. "Instead, propulsion automatically arises from the thigh pressing down strongly in support of the body." Until recently, researchers thought that the thigh pressing down served to support the body only.
These new findings will not only result in textbook revisions, but will also be tested on the robot Hector, which is based on a stick insect. "The robot is similar to a stick insect and is equipped with elastic leg joints," says Chris Dallmann. "We now want to test which advantages come with having a single joint controlling both body height and propulsion, as seen in the biological counterpart."
In his doctoral dissertation, Chris Dallmann is dealing with the question of how stick insects adapt the way they walk to their environment. He has been a member of the CITEC Graduate School since late 2013. The CITEC Graduate School was founded in 2008 to provide further academic qualification in cognitive interaction technology at Bielefeld University. Currently, the Graduate School has approximately 100 members.
source: Bielefeld University